6-Axis
下载驱动库
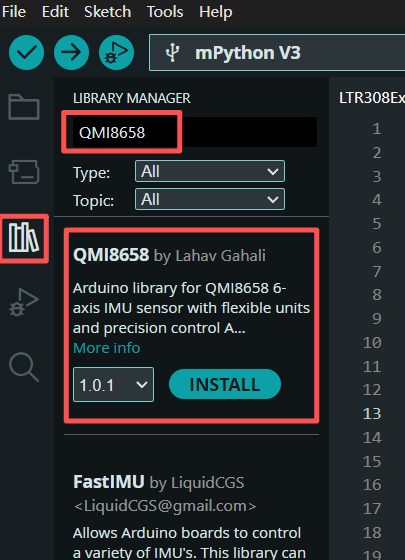
搜索QMI8658库并安装。
示例代码
在arduino IDE中,点击「File」→「Examples」→「QIM8658」→「QMI8658_Basic」打开示例。
注意
掌控板QMI8658 6轴连接到IIC接口,SDA接P20(GPIO44),SCL接P19(GPIO43).找到并修改以下代码行:
bool success = imu.begin(44, 43);
示例-QMI8658.ino
1/*
2 QMI8658 Basic Example - Enhanced with Flexible Units & Precision
3
4 This example demonstrates the enhanced QMI8658 library with flexible
5 unit selection and precision control.
6
7 New Features:
8 - Choose between mg or m/s² for accelerometer
9 - Choose between dps or rad/s for gyroscope
10 - Set decimal precision (2, 4, 6 digits)
11 - Alternative reading functions for specific units
12
13 Connections for RP2040:
14 - VCC to 3.3V
15 - GND to GND
16 - SDA to pin 44
17 - SCL to pin 43
18
19 Author: [Your Name]
20 Date: [Date]
21*/
22
23#include <QMI8658.h>
24
25// Create QMI8658 instance
26QMI8658 imu;
27
28void setup() {
29 Serial.begin(115200);
30 delay(1000); // Wait for serial to stabilize
31
32 Serial.println("🚀 QMI8658 Enhanced Library - Flexible Units & Precision");
33 Serial.println("========================================================");
34
35 // Initialize the sensor with pins 6,7 (uses Wire1 automatically on RP2040)
36 Serial.println("📍 Initializing sensor...");
37 bool success = imu.begin(44, 43);
38
39 if (!success) {
40 Serial.println("❌ Failed to initialize QMI8658!");
41 Serial.println("Please check:");
42 Serial.println("- Wiring connections (SDA=6, SCL=7)");
43 Serial.println("- Power supply (3.3V)");
44 Serial.println("- I2C address");
45 while (1) {
46 Serial.println("⏳ Retrying in 5 seconds...");
47 delay(5000);
48 }
49 }
50
51 Serial.println("✅ QMI8658 initialized successfully!");
52 Serial.print("WHO_AM_I: 0x");
53 Serial.println(imu.getWhoAmI(), HEX);
54
55 // Configure sensor settings
56 Serial.println("\n⚙️ Configuring sensor...");
57
58 // Set accelerometer range (±8g)
59 imu.setAccelRange(QMI8658_ACCEL_RANGE_8G);
60
61 // Set accelerometer output data rate (1000Hz)
62 imu.setAccelODR(QMI8658_ACCEL_ODR_1000HZ);
63
64 // Set gyroscope range (±512dps)
65 imu.setGyroRange(QMI8658_GYRO_RANGE_512DPS);
66
67 // Set gyroscope output data rate (1000Hz)
68 imu.setGyroODR(QMI8658_GYRO_ODR_1000HZ);
69
70 // ⭐ NEW: Configure units and precision
71 Serial.println("\n🎯 Setting units and precision...");
72
73 // Set units (DEFAULT: mg for accel, dps for gyro - matches most IMU displays)
74 imu.setAccelUnit_mg(true); // Use mg (like your screen: ACC_X = -965.82)
75 imu.setGyroUnit_dps(true); // Use dps (degrees per second)
76 imu.setDisplayPrecision(6); // 6 decimal places (like your screen)
77
78 // Alternative ways to set units:
79 // imu.setAccelUnit_mps2(true); // Would use m/s² instead of mg
80 // imu.setGyroUnit_rads(true); // Would use rad/s instead of dps
81 // imu.setDisplayPrecision(QMI8658_PRECISION_4); // 4 decimal places
82
83 // Enable sensors
84 imu.enableSensors(QMI8658_ENABLE_ACCEL | QMI8658_ENABLE_GYRO);
85
86 Serial.println("✅ Configuration complete!");
87
88 // Show current settings
89 Serial.println("\n📋 Current Settings:");
90 Serial.print(" Accelerometer unit: ");
91 Serial.println(imu.isAccelUnit_mg() ? "mg" : "m/s²");
92 Serial.print(" Gyroscope unit: ");
93 Serial.println(imu.isGyroUnit_dps() ? "dps" : "rad/s");
94 Serial.print(" Display precision: ");
95 Serial.print(imu.getDisplayPrecision());
96 Serial.println(" decimal places");
97
98 Serial.println("\n📊 Starting sensor readings...");
99 Serial.println("Time(ms)\tAcc_X(mg)\tAcc_Y(mg)\tAcc_Z(mg)\tGyro_X(dps)\tGyro_Y(dps)\tGyro_Z(dps)\tTemp(°C)");
100 Serial.println("-----------------------------------------------------------------------------------------");
101
102 delay(100); // Allow sensor to stabilize
103}
104
105void loop() {
106 // Method 1: Read all sensor data at once (recommended)
107 QMI8658_Data sensorData;
108
109 if (imu.readSensorData(sensorData)) {
110 Serial.print(millis());
111 Serial.print("\t");
112 Serial.print(sensorData.accelX, 6);
113 Serial.print("\t");
114 Serial.print(sensorData.accelY, 6);
115 Serial.print("\t");
116 Serial.print(sensorData.accelZ, 6);
117 Serial.print("\t");
118 Serial.print(sensorData.gyroX, 6);
119 Serial.print("\t");
120 Serial.print(sensorData.gyroY, 6);
121 Serial.print("\t");
122 Serial.print(sensorData.gyroZ, 6);
123 Serial.print("\t");
124 Serial.println(sensorData.temperature, 1);
125 } else {
126 Serial.println("❌ Failed to read sensor data!");
127 }
128
129 /*
130 // Method 2: Read sensors individually with specific units
131 float ax, ay, az;
132 float gx, gy, gz;
133 float temp;
134
135 // Read with default configured units
136 if (imu.readAccel(ax, ay, az) && imu.readGyro(gx, gy, gz) && imu.readTemp(temp)) {
137 Serial.print("📈 Accel (mg): ");
138 Serial.print(ax, 6); Serial.print(", ");
139 Serial.print(ay, 6); Serial.print(", ");
140 Serial.print(az, 6);
141
142 Serial.print(" | Gyro (dps): ");
143 Serial.print(gx, 6); Serial.print(", ");
144 Serial.print(gy, 6); Serial.print(", ");
145 Serial.print(gz, 6);
146
147 Serial.print(" | 🌡️ Temp: ");
148 Serial.print(temp, 1);
149 Serial.println("°C");
150 }
151
152 // Method 3: Read with specific units (if supported by your library)
153 // Example: Force read in m/s² even if default is mg
154 // if (imu.readAccel_mps2(ax, ay, az)) {
155 // Serial.print("Accel in m/s²: ");
156 // Serial.print(ax, 6); Serial.print(", ");
157 // Serial.print(ay, 6); Serial.print(", ");
158 // Serial.println(az, 6);
159 // }
160 */
161
162 delay(100); // Read at 10Hz
163}
运行效果
串口打印6轴数据。